
Drone Blimp
Con l'avvento di droni, quadricotteri, velivoli ad ala rigida, micro, macro... è emersa una tecnologia completamente nuova, che col tempo può e deve essere adattata alla tecnologia LTA.
È tempo di una sinergia tra queste due tecnologie a vantaggio di entrambe.
Integrazione tra tecnologia LTA e droni
Fino ad ora, la progettazione di dirigibili a volo esterno è stata profondamente appesantita dall'eredità del passato. E tutto ciò va bene perché non c'era altra scelta. Con l'avvento delle tecnologie digitali, e in particolare la loro applicazione ai droni, è emersa una classe di tecnologie completamente nuova i cui vantaggi in termini di stabilizzazione e controllo del volo possono essere applicati anche alla tecnologia LTA. Ci sono voluti vari esperimenti come T-Blimp, UniBlimp e vari altri concept, più o meno riusciti, per comprendere finalmente che la futura vita e il progresso della tecnologia LTA non sono possibili senza l'utilizzo e la sinergia con altre tecnologie compatibili.
Prima la forma - Il problema principale del volo a forma di Zeppelin è la drastica differenza tra la resistenza aerodinamica frontale e quella trasversale (naso e fiancate). Con la forma ellissoidale, riduciamo notevolmente queste differenze in modo che non ci siano grandi fluttuazioni nella resistenza aerodinamica durante il volo. Attraverso test in galleria del vento (simulazione), abbiamo scoperto che il rapporto tra la sezione frontale e quella trasversale è del 68% (0,68), mentre nella forma di Zeppelin questo rapporto è del 250% e anche di più (a seconda della forma e delle dimensioni dello stabilizzatore). Da 0,68 a 2,5 o più - una differenza notevole.
Secondo la potenza - Ogni pilota di qualsiasi aereo desidererà sempre più potenza. Quanta ne ha, ancora più potenza. Il che è comprensibile. Dato che non c'è "nessun supporto" durante il volo stesso, l'unica cosa su cui possiamo fare affidamento è la potenza del motore, ovvero quanto qualcosa ci spinge o ci tira. Adottando una forma ellissoidale, abbiamo riorganizzato la distribuzione del volume, ottenendo così maggiore potenza su un corpo più piccolo.
Terza la sinergia - Il risultato finale è la combinazione di tutti gli elementi, dalla forma al software. Questo è esattamente il prototipo del Blimp-Drone di cui vedete foto e video. Abbiamo creato un prototipo ellissoidale di 3,4 m x 2 m x 1,4 m su cui eseguiremo tutti i test necessari per perfezionarlo. Per il mercato, a partire dal 2026, lanceremo un Blimp-Drone di 5,2 m x 3 m x 2,2 m con un carico utile di almeno 3 kg, il cui nome provvisorio è BD-5.2F-26.
Primo prototipo di drone Blimp da 3,4 m

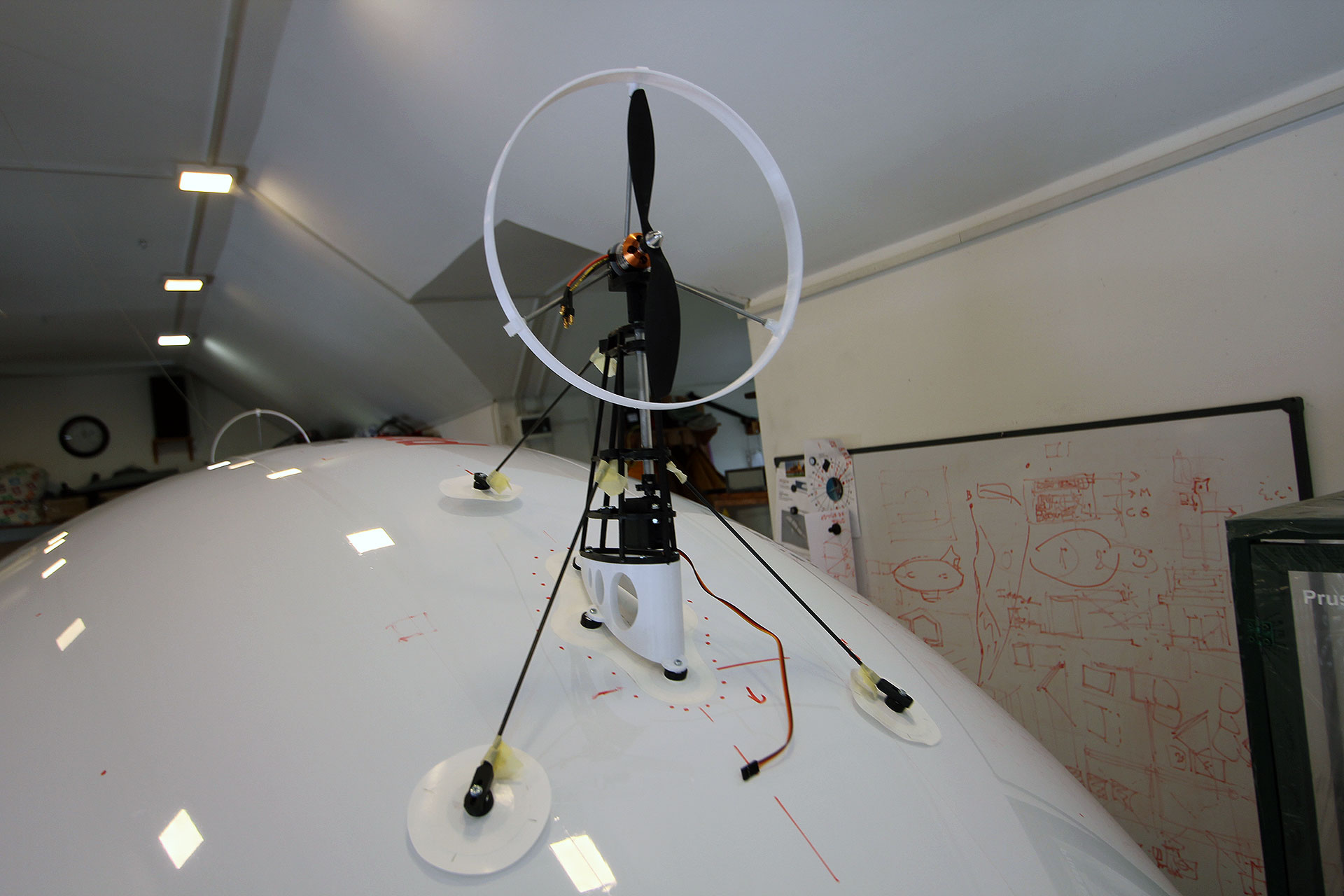

Caratteristiche principali e descrizione del Blimp-Drone
Come vola un drone completamente non aerodinamico (quadruplo o altro)? Semplicemente utilizzando la potenza pura controllata. Questa potenza controllata è resa possibile dalla digitalizzazione, dai sensori, dai regolatori di velocità e dalla progettazione hardware stessa.
Abbiamo ridotto i droni Blimp a questi soli componenti. Non ci sono stabilizzatori con alettoni che aggiungerebbero solo peso e complicherebbero la progettazione stessa. Solo un pallone e 4 motori con una gondola dove si trova l'elettronica.
C'è una caratteristica dei dirigibili che i droni non hanno: un m³ di elio o idrogeno può sollevare circa un chilogrammo di carico. In altre parole, quando i motori sono spenti, il dirigibile continua a fluttuare e non c'è pericolo di schiantarsi. Quindi, laddove non è necessario un posizionamento estremamente preciso in aria, il vantaggio dei droni Blimp è insuperabile. Grazie alla telecamera rotante a 360°, è possibile librarsi in volo senza utilizzare il motore, aumentando notevolmente l'autonomia di volo di diverse volte. Teoricamente e per progettazione, il drone Blimp presenta superfici perfettamente adatte alle celle solari sulla parte superiore, il che può aumentare ulteriormente l'autonomia di volo.
Abbiamo anche incorporato funzionalità simili a quelle dei droni, come: "ritorno alla posizione iniziale", "mantenimento della posizione relativa", "stabilizzazione", ....
BD-5.2F-26 Drone Blimp per esterni
Preordini: rczeppelin@gmail.com
Sarà in vendita a partire da febbraio 2026.
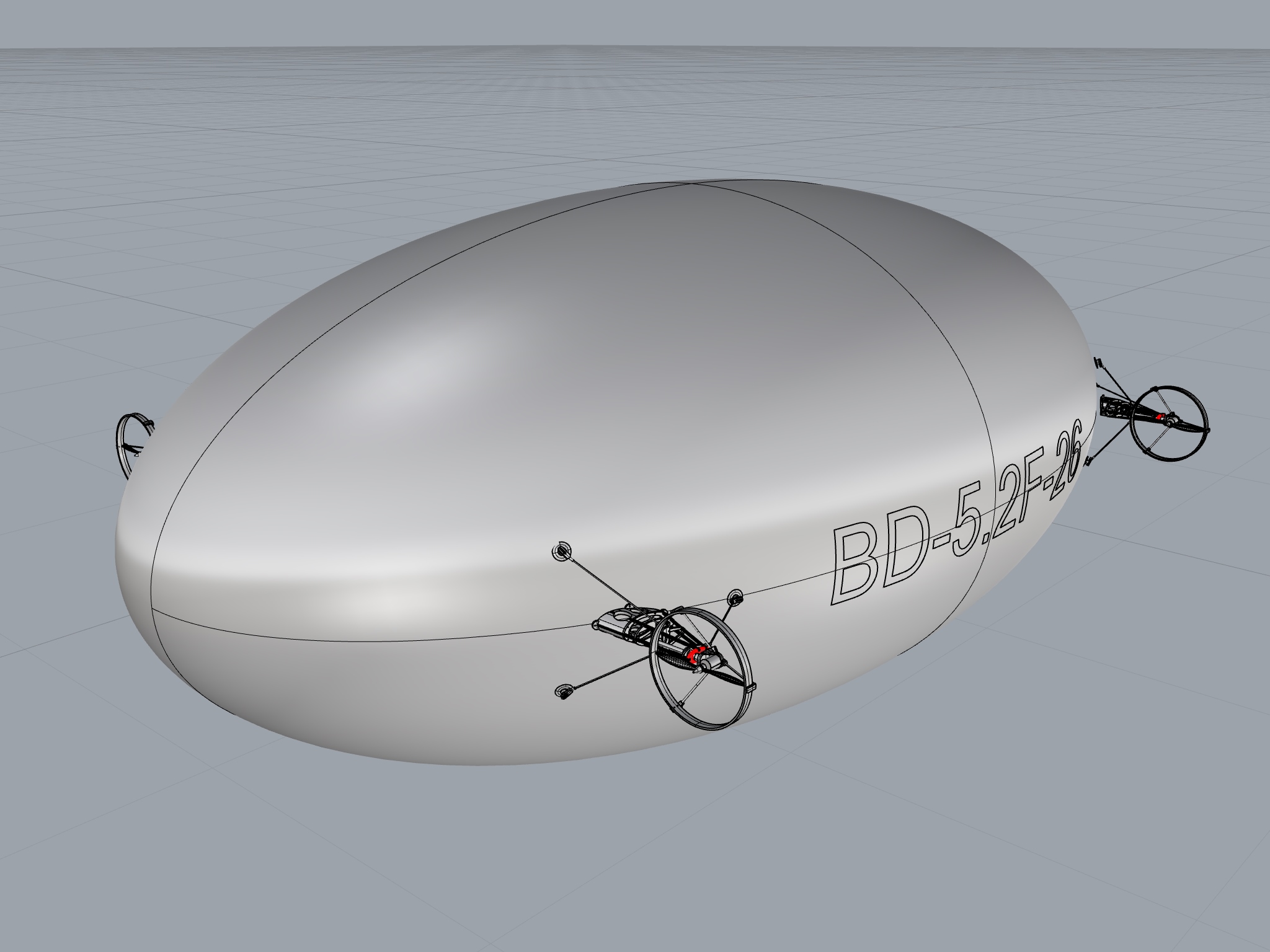

Specifiche tecniche/Descrizione
| Blimp Drone type / name | 4 vectored motors - BD-5.2F-26 |
| Blimp size | 5.2 m (length) x 3 m (width) x 2.2 m (height) |
| Volume | 18 m3 |
| Blimp envelope material | 100 microns Polyurethane |
| Assembly technology | Ultrasonic welding |
| Brushless motors | 4 x Kavan 3542-950 |
| Brushless ESC | 4 x Kavan PRO-80SB |
| Motors mount | Carbon/3D print/aluminum composite |
| Motors axis | 180 degrees |
| RC Safety valve | Set into the envelope |
| RC Safety reel | Set in the nacelle area |
| Shaft rotation and motor speed control | Arduino/TX/RX/SBUS |
| RX/TX | Futaba/Kavan/ or similar |
| Autopilot upgradable | YES |
| Payload | 3 kg minimum |
| Price ready to fly | 27.493 Euro / 31.171 USD |
| Optional | Internal light (570 Euro), Airbrush logo 2 sides (630 Euro), Total envelope airbrush (3530 Euro) |
| Pre-orders | YES - with 50% payment |
